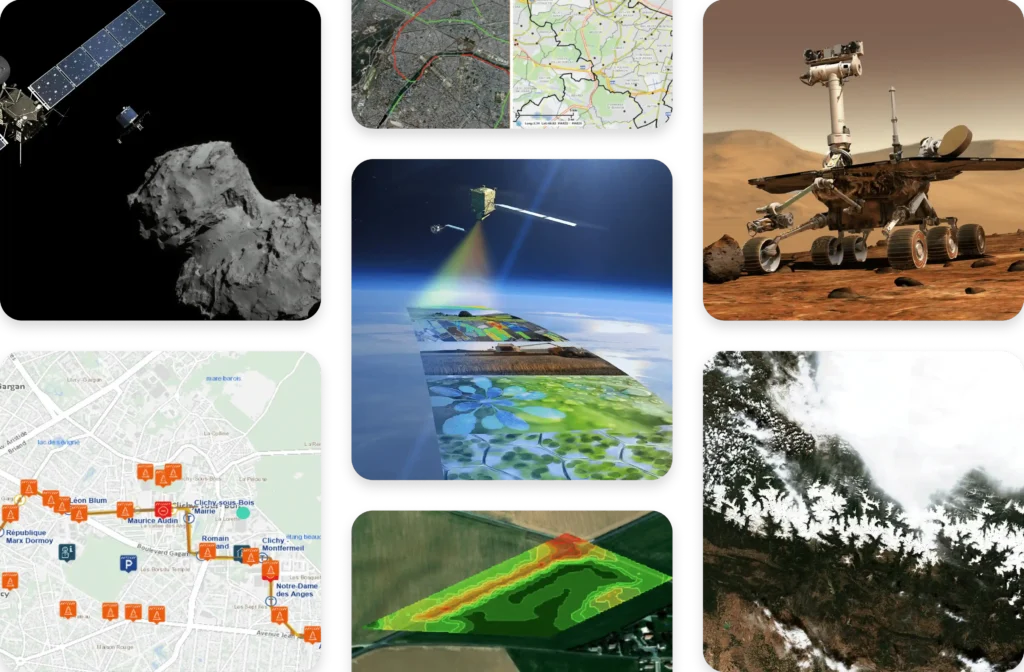
L’ingénierie de la donnée au service de la Planète et des Territoires
Depuis 26 ans, nous proposons des solutions à forte valeur ajoutée et maîtrisons toutes les technologies d’imagerie et informatiques, de la donnée image aux systèmes logiciels complexes.
Nous avons la confiance de + de 150 clients
Plus de 350 projets
Nous sommes présents dans de nombreux projets français, européens et internationaux. Retrouvez sur sa page dédiée une liste non-exhaustive des projets dans lesquels nous avons participé ou participons actuellement.

Rejoignez-nous !
Nous sommes à la recherche de nos futur(e)s collègues dans de nombreux domaines ! Explorez nos multiples offres d’emploi et commencez un nouveau chapitre dans votre carrière chez Magellium Artal Group.
Nos expertises de pointe s’appliquent à de nombreux domaines
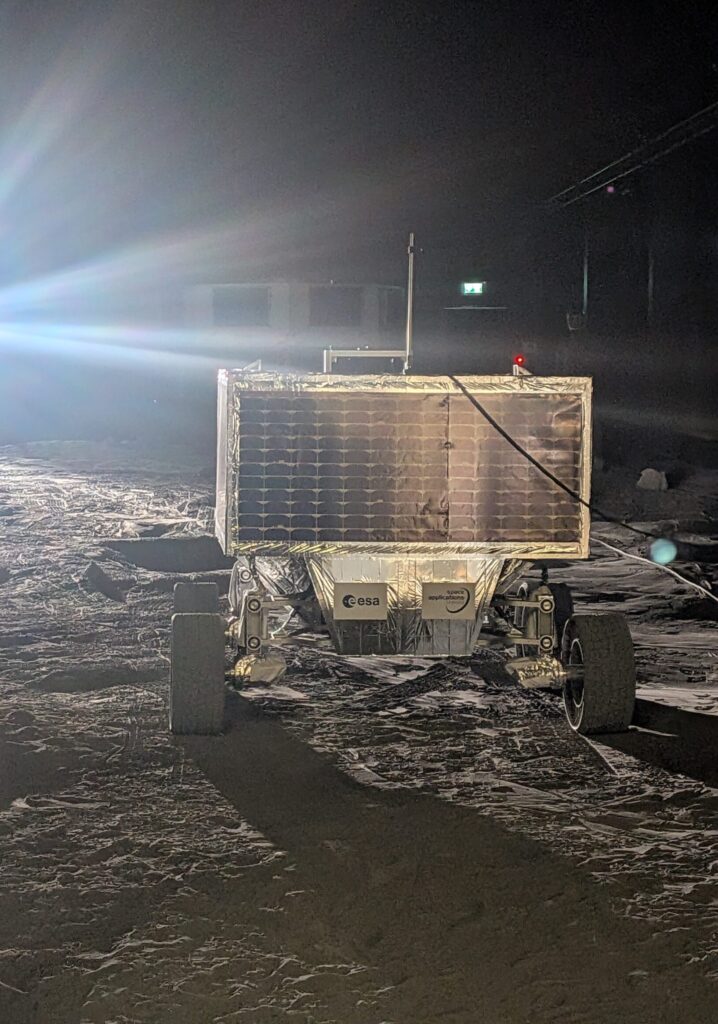
Traitement d’image, cartographie, robotique, intelligence artificielle, géo-intelligence, développement logiciel, nous sommes une entreprise d’ingénierie qui œuvre dans les domaines les plus généraux comme des plus spécifiques de l’ingénierie.
Optimisez l’efficacité de votre projet grâce à nos solutions clés-en-main
Nos solutions sont conçues pour répondre à vos besoins les plus complexes afin de propulser votre projet vers la réussite. Nos solutions peuvent s’appliquer en fonction du besoin, prêtes à l’emploi ou sur-mesure.
+5
solutions complètes et efficaces
+7
technologies qui ont fait leur preuve

Découvrez les nombreux secteurs d’activité dans lesquels nous intervenons
Du spatial à la défense, en passant par la sécurité, les transports, l’énergie ou encore l’environnement et le climat, nous sommes présents dans de nombreux secteurs d’activité. Trouvez-vous le vôtre ?
+150
clients nous font confiance
+10
secteurs d'activité différents
Qui sommes-nous ?
Magellium Artal Group a plus de 26 ans d’expérience en ingénierie de la donnée, imagerie et technologies informatiques. Nous utilisons l’innovation et le savoir-faire pour répondre aux besoins de nos clients, même les plus spécifiques et complexes. Acteur dans notre écosystème, nous prônons des valeurs fortes qui font sens et privilégions des engagements réalisables et des actions concrètes.

Le blog de Magellium Artal Group

Vous avez une question ?
Nous vous répondrons aussi vite que met la donnée satellite pour atteindre l’opérateur.